
Elbow Driven Orthosis (UW // 2018)



INTRODUCTION
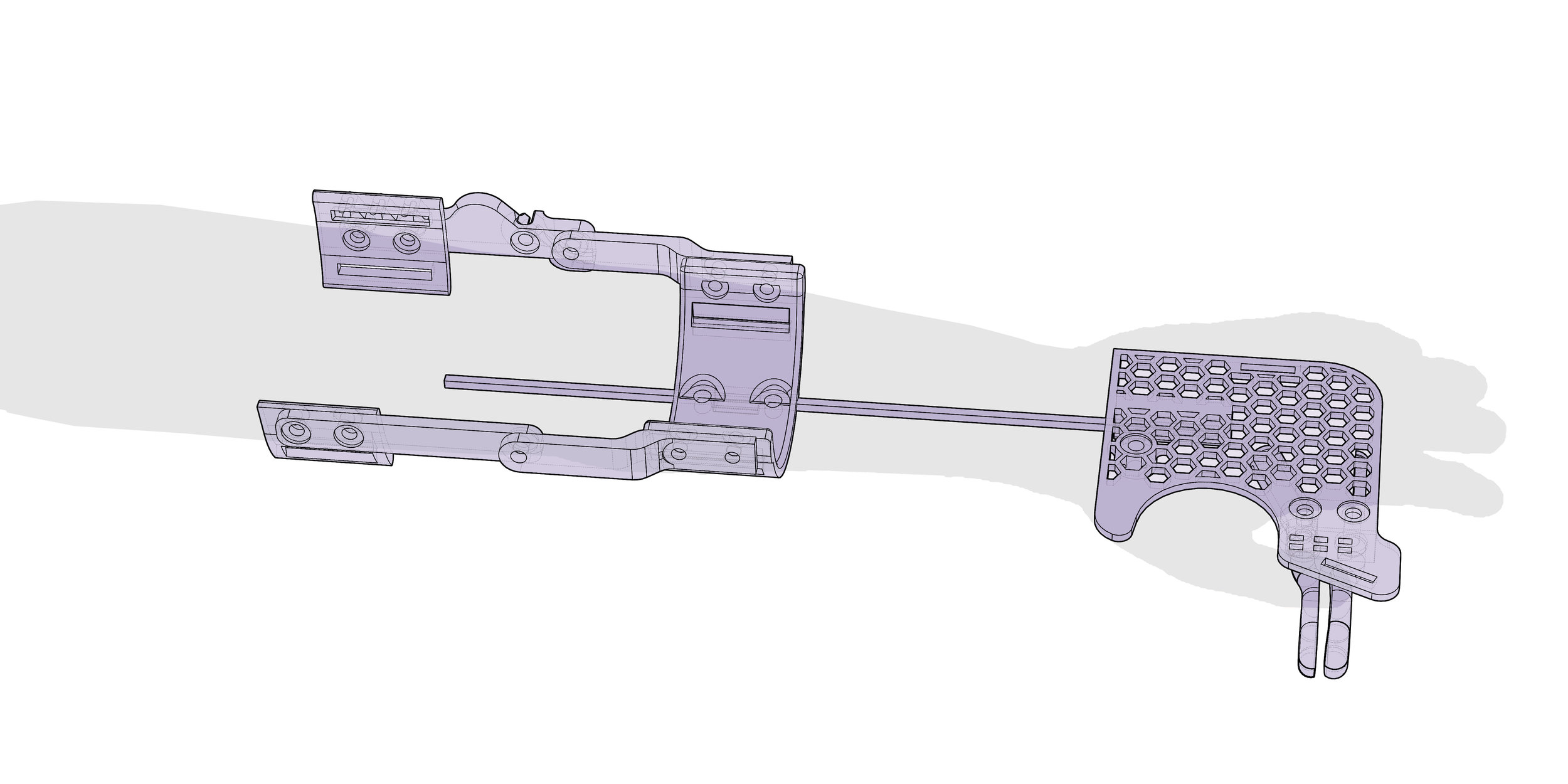
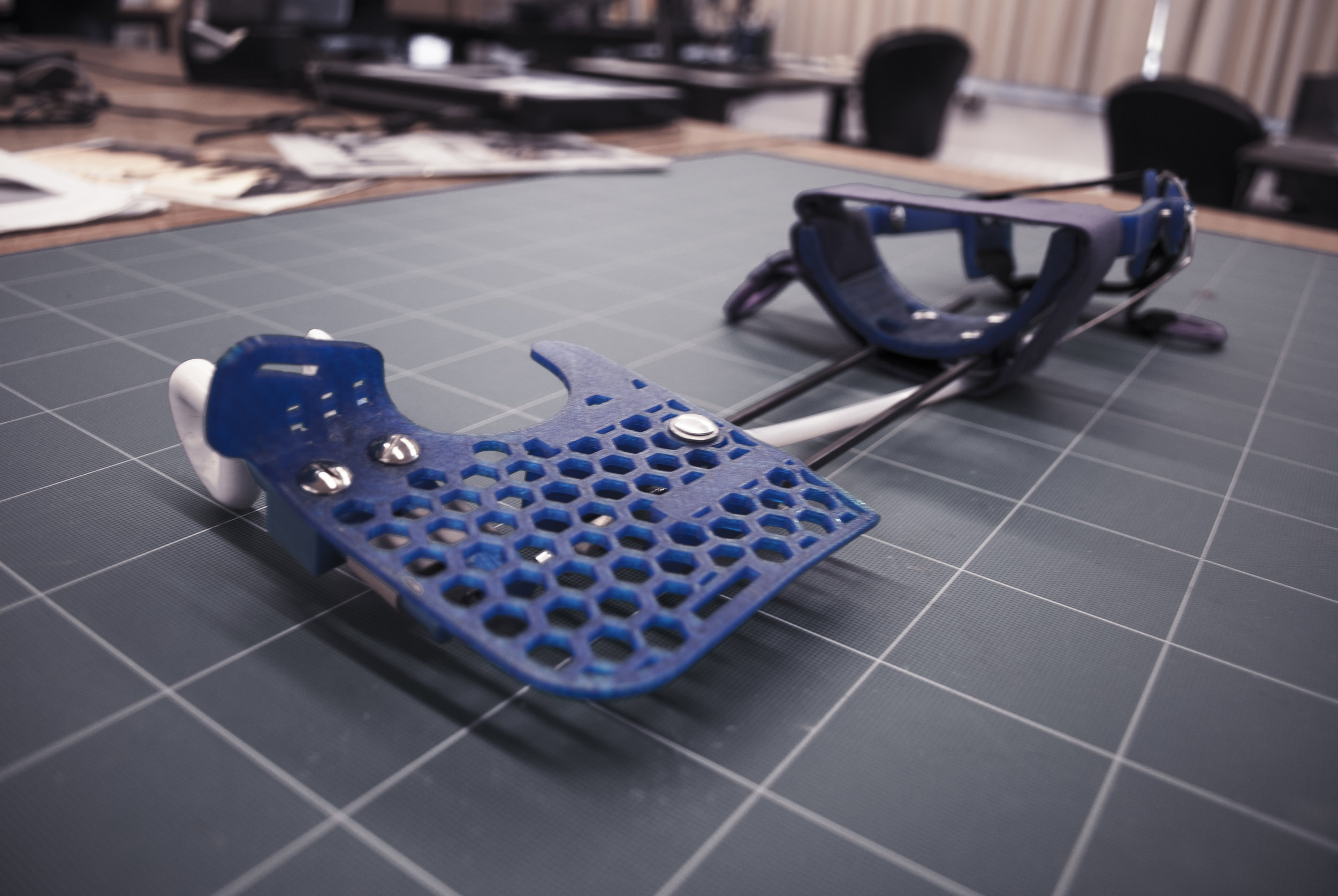
The Elbow Driven Orthosis (EDO) project and research involves the design, prototype production, and participant use data collection of a novel, adjustable, and cost-effective body-powered orthosis. The goal of EDO is to assist individuals with motor impairment in their upper limbs due to neuromuscular injury perform activities of daily living (ADL). Motor impairment can be characterized by lack of strength, control, dexterity, or range of motion in the affected limb; though it usually manifests as some combination of these symptoms. We often suggest our audience try opening a bottle, hanging a shirt, or preparing food with one hand as a simple but effective empathy exercise. There is clearly room for improving the standard of living of individuals limited to one arm with a full range of motion by making bimanual tasks more accessible.
ORTHOSES
Orthoses are braces that go around an individual’s affected limb, and are used to either restrict unwanted motion, or help facilitate impaired motion; though the latter is the more common of the two. Prostheses are devices that act as limb replacements for individuals that have lost a part of a limb. Due to the nature of prosthetics, these devices have seen more development of motion facilitation than orthotics. EDO aims to translate effective body-powered prosthetic mechanisms into orthoses.

RESEARCH & DEVELOPMENT
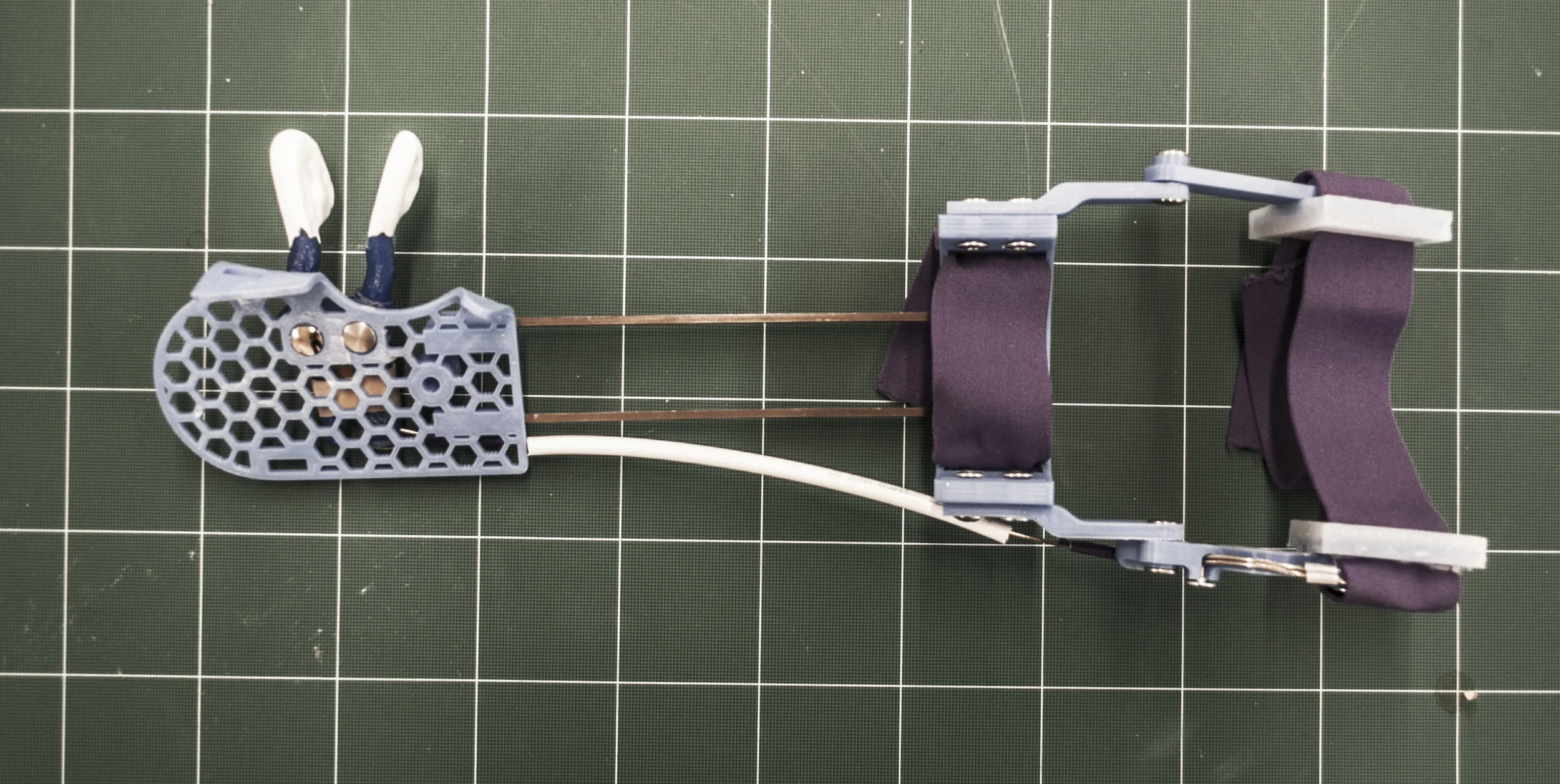
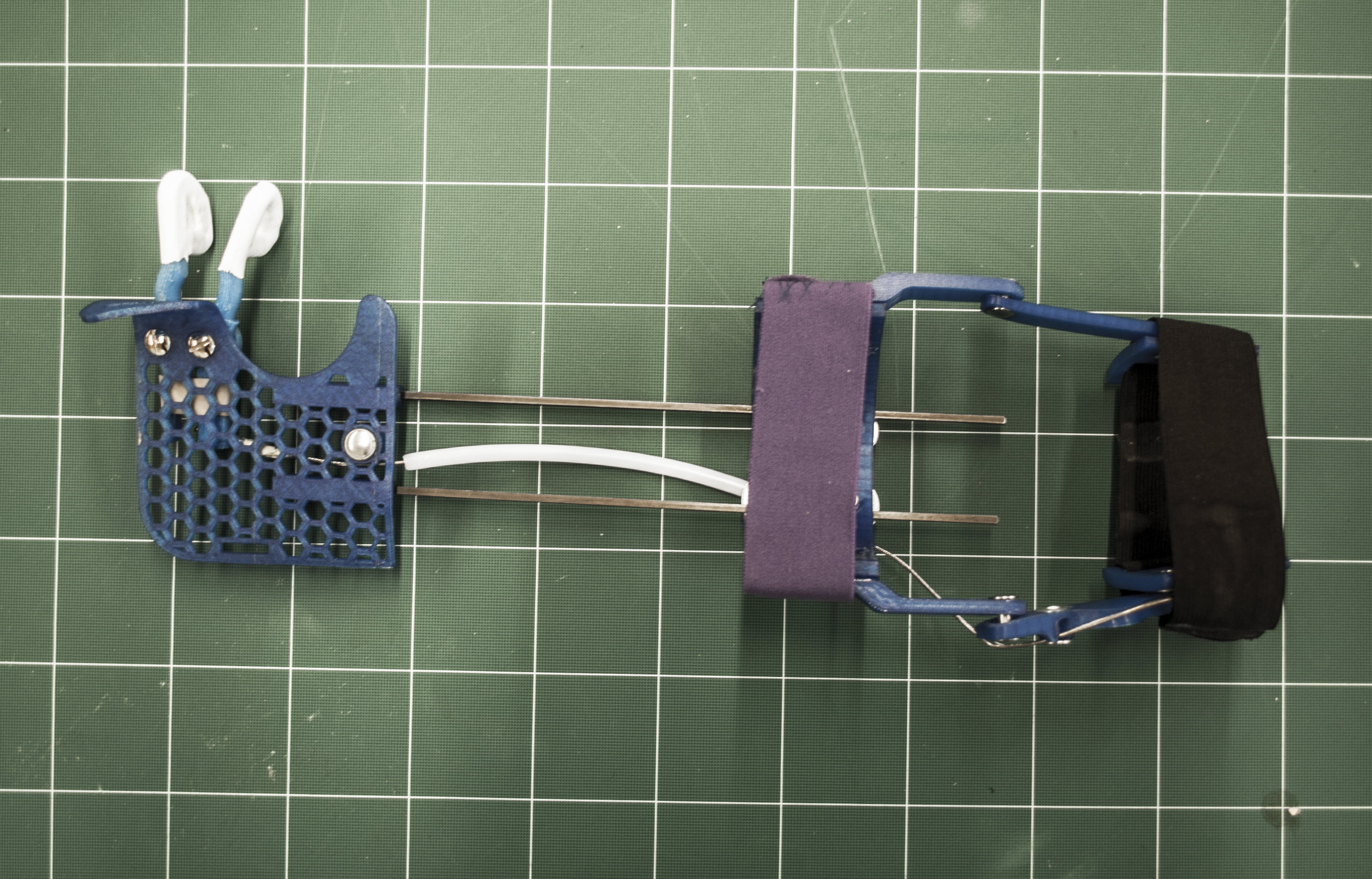
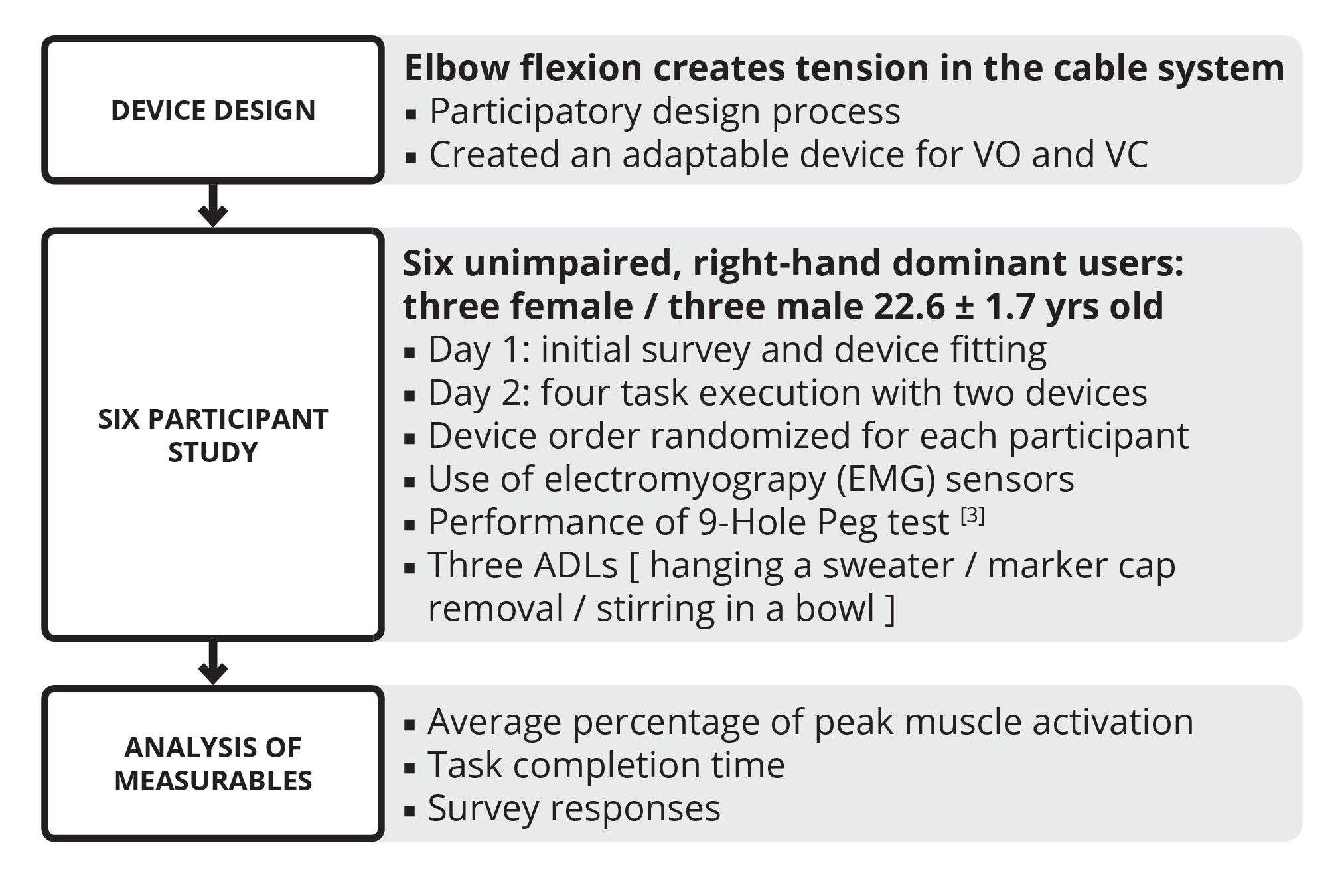
An iterative design process is utilized in the development of the EDO device. This enables careful examination of each component, in the form of a series of participant trials to answer a design-related research question. 3D printing enables rapid prototyping and rapid implementation of design improvement, as well as low-cost production (the device currently costs around $26), and open source collaboration. The previous study, whose team I was not a part of, examined the end-effector shape and its impact on functional performance and user perception. The most recent iteration and study, whose team I was a part of, examines actuation methods in two device configurations, voluntary opening (VO) and voluntary closing (VC). To execute this examination, we asked “How does muscle activity, functional performance, and user perception compare between VO and VC actuation methods?” We hypothesized that the VO mechanism would require greater muscle activation in the biceps and flexor carpi radialis (FCR). Electromyography (EMG) was used to measure muscle activity, while time to completion of four tasks with carefully laid out protocol was used to measure functional performance. User perception was provided via a pre- and post-trial survey, in addition to observations and comments made during the trail by the participant or researchers.

RESULTS
The variability in task completion times and small differences in muscle activation suggests that both VO and VC are viable device options, but should be adjusted to each individual. Additionally, due to the limited number of participants, we cannot confirm or reject our initial hypothesis.

FUTURE OF EDO
Current discussions on the future of EDO involve refining adjustability, significant reduction of muscle activity in the forearm, reduction of required force and range of motion applied by the user to actuate the end effectors, an ability to shift between nuanced vs broad actuation, and an ability to lock the end effectors to free the user from being required to hold a position to maintain grip. Additional, more lofty, discussions have touched on the idea of manipulating the user’s hand, as opposed to end effectors, to complete the targeted tasks. This could provide the benefit of the user experiencing tactile feedback, assuming tactile feedback is a sensation the user has in the impaired limb.
My role in this project included assistance in device design, device production, research protocol design, conducting participant trials, research presentation, and team organization methods. Plans exist for my continuation of this project with the above suggestions, pending my acceptance into the University of Washington’s Mechanical Engineering department’s BSME program as a postbaccalaureate student.