
Space Chair (Block 1)
Premise.
As I’ve explored the field of Space Architecture, questions regarding specific instances of person-object interactions (furniture) have emerged, and have largely captured my interest. One such question is “What does it mean to be ‘seated’ at a table in microgravity?”
A table is both a gathering point, and a thing-holder. A seat is both a human holder, and a means of claiming a place at the table. Remove the downward vector of gravity, and these functions largely stay the same. The only difference is what it means to “hold”… rather than preventing something from falling down, we need to prevent it from drifting away. What do these slightly redefined “tables” and “chairs” look like? The quality of a person’s experience of space will be largely dictated by how well we answer these questions.
The following work was created during my internship at NASA’s Center for Design and Space Architecture (CDSA) located at the Johnson Space Center (JCS) during the Summer of 2020.

The Space Chair (Block 1).
Problem & Previous Solutions.
The issue of comfortably moving, stopping, and staying put without gravity can be tricky. Moving about a habitat is often enabled through handrails and other grip-able objects referred to as “mobility aids”. Staying put at a workstation, window, or galley is achieved through a range of devices collectively referred to as “restraints”. While both realms could use some improvement, existing attempted solutions for restraints are outright awkward and highlight the deficit of our understanding of microgravity living.

Galley table thigh restraints (left) and workstation strap-in ‘seating’ restraint (right), both designed for and used on the U.S. Skylab. Astronauts found the postures promoted by these devices to be uncomfortable when held for long durations, and result in localized sore areas.
Astronauts have complained of discomfort, soreness, and impatience with complex mechanisms. One core issue revolves around how to best accommodate the range of Neutral Body Postures (NBP) exhibited by crewmembers in microgravity. This position is adapted as the equilibrium point for all muscles relaxing. Prescribing a position that deviates from this posture, for any given individual, will cause muscles to be activated and, over extended periods of time, to become sore.
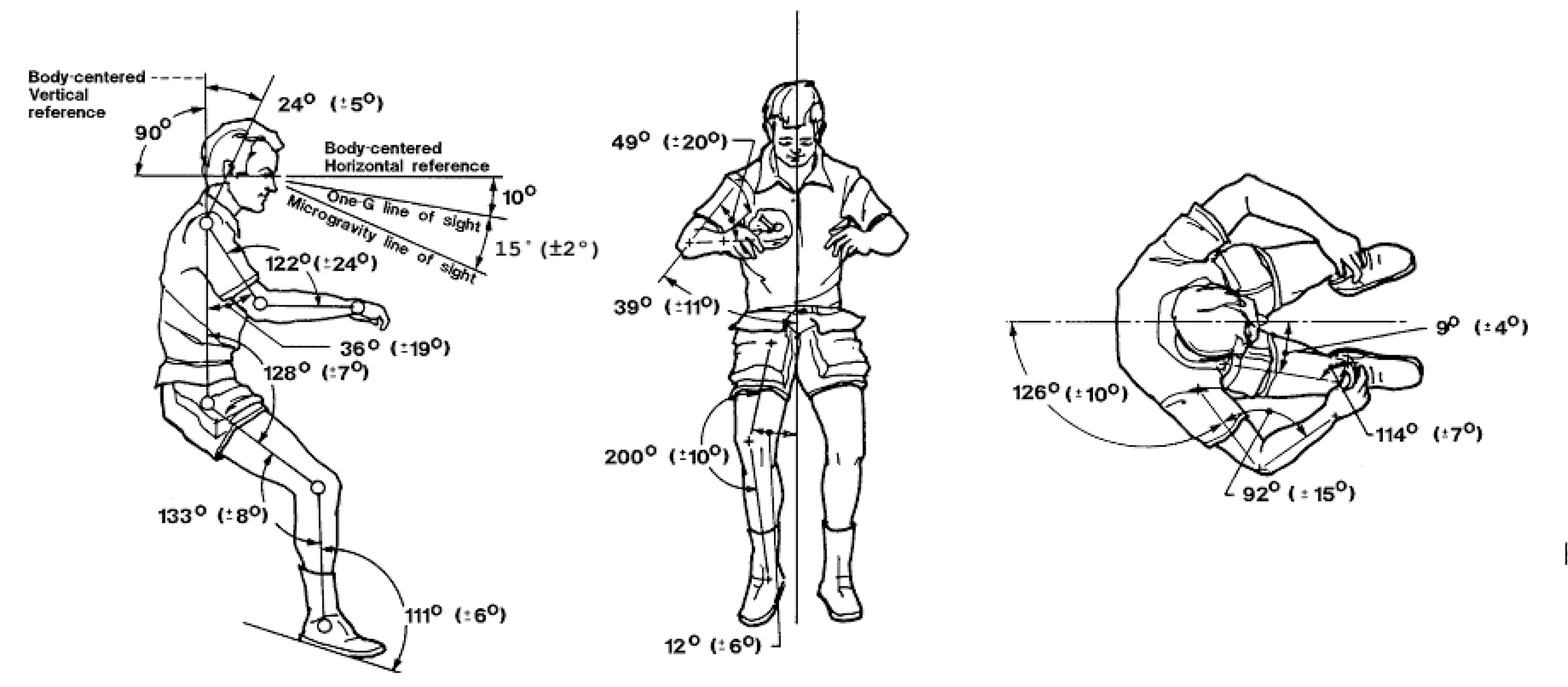
The Neutral Body Posture is the position a human body naturally adapts as it rests in microgravity. The most comfortable accommodations in microgravity will allow for an individual to rest in their unique NBP.
As humanity sends more people into space, we will need to advance ‘stay-put’ solutions to become more accommodating to every person’s NBP, and thus more comfortable. One first step may be to simply rename this category of devices / space furnishings. The name “restraint” implies a mode of use of these devices (to hold a person in place), as opposed to the function (to enable the person to stay in one spot). Many attempted solutions exhibit this line of thinking, where a portion of the user’s body is wedged into place.

Prototypes of restraint / stay-put device designs flown on a zero-g parabolic flight in a 2004 study responding to consistent astronaut comments on discomfort from prolonged use of restraints.
The Space Chair (Block 1).

Friction is a function of the force acting normal to the interacting surfaces, and a material property of these surfaces referred to as the “coefficient of friction”. By creating a circumstance where an individual can increase normal force (ex: squeezing knees together), the opportunity to create an actionable friction force arises.
Development of this “Space Chair” started with the thinking of flipping the wedging paradigm: rather than the device wedging the user, the user should wedge the device. By this flip alone, the user is given the ability to modulate the amount of “grip” experienced between themselves and the device at any given time; a flexibility not afforded by the device-wedging-user paradigm. To add to user friendliness, the Space Chair should enable the user to adjust their position without using their hands, and should be easily repositioned to accommodate a range of postures and statures. The cross-sectional profile of this Space Chair should also provide some stability. Taking typing as an archetypical activity to design for, we can identify what forces will need to be counteracted and begin sculpting a form that enables the user’s NBP to balance out most forces. These desirements appear to overlap synergistically.

A possible cross-sectional shape to counter some forces from the archetypical use case of typing.
The ideas presented by these force diagrams were then tested using Unreal Engine 4.0. Here, we imported our models and used the software’s physics engine capability to simulate the use of profiles by figures representing a range of NBP in zero-g. By using these simulations, we were able to iterate through different forms, sculpting the Space Chair into its final Block 1 form.





Finally, the sculpted interface needs an adjustable mechanism that will hold it in place. Many of the locking mechanisms used in previous stay-put devices have proven to be difficult to use in microgravity. The tedious overhead for use quickly motivate crewmembers to abandon use of these devices entirely. Additionally, from my personal experience, most locking mechanisms can only be locked in discrete positions, as opposed to providing a continuous range of positions. A potentially fruitful alternative would be the use of an adjustable mechanism that has well-tuned antagonist-force joints - like many monitor arms. Such joints can be achieved through the use of friction, cabling systems, or hydraulics. The a friction joint lends itself to the base sphere and two rotating joints; while a hydraulic mechanism would be best suited for the telescoping shaft. These components will require further detailing and testing.
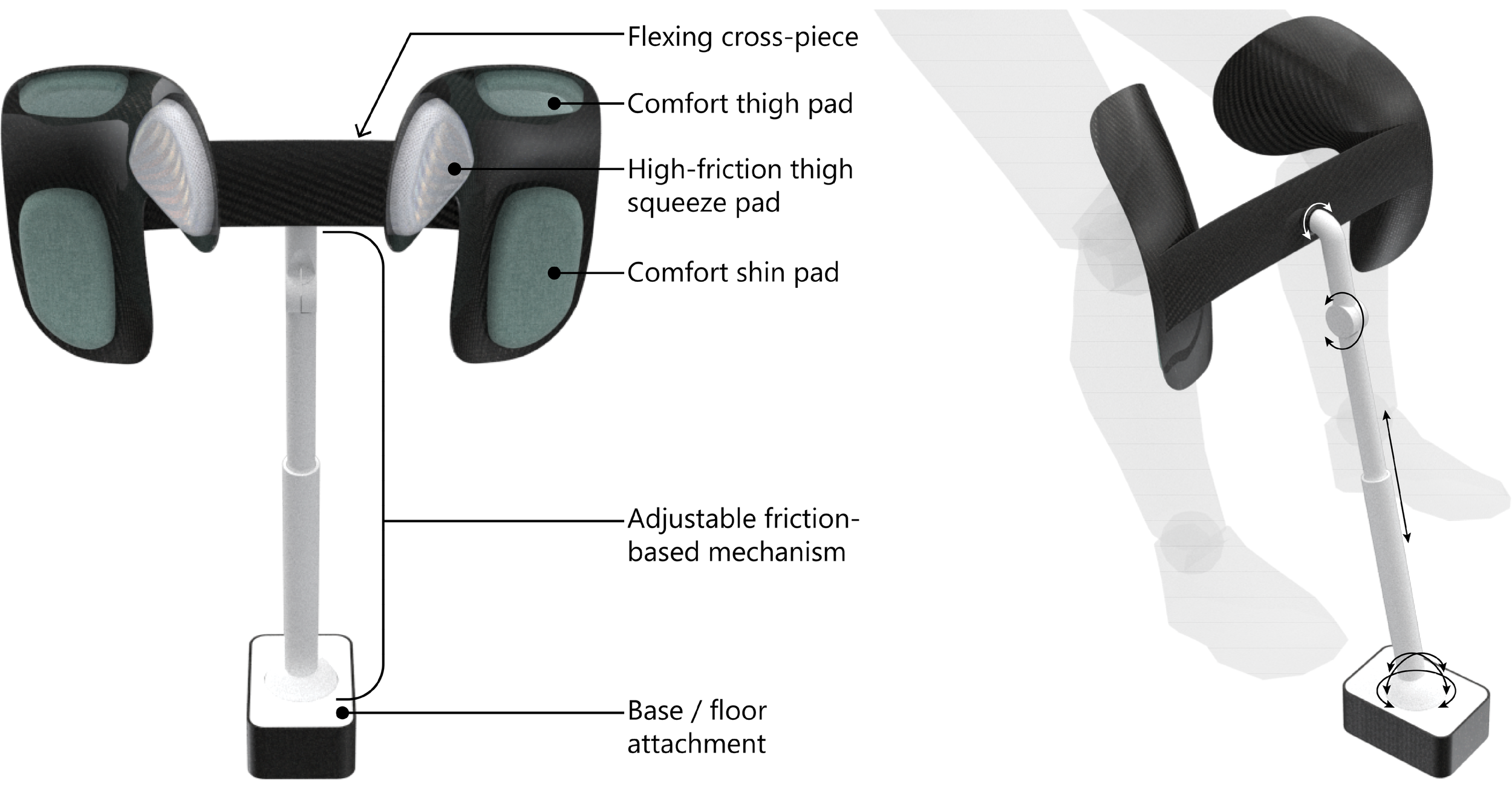
The Space Chair’s form enables the user to modulate their grip on the piece, potentially providing greater comfort and sense of agency. A flexible 4-degree of freedom arm enables the user to reposition the chair, accommodating a range of postures and statures.
Next Steps.
The main advancements that need to be made in this project are the refinement of the interface form, and the further detailing of the adjustable arm. Both can be explored further through physical prototyping and testing. A range of subjects, representing different statures and NBP postures, should be used to inform the molding an all-fitting interface. Meanwhile a trial-and-error approach can be applied to the arm mechanisms using COTS equipment (telescoping shaft) and 3D printing custom parts (base sphere). Once fabricated, the prototypes may be tested in a pool, with subjects outfitted to maintain neutral buoyancy, to further inform the design. However, given that three of the four joints shown will likely use friction as their means of “locking”, testing in water may prove to be challenging. A series of tests may be conducted on a Zero-G parabolic flight, however such a test is prohibitively costly at this time.